


Датчики линейного перемещения принцип работы
Позиционирование авиасимулятора
Гидравлические цилиндры позиционирования кабины авиасимулятора требуют быстрого и надежного измерения текущего положения штока для динамического управления. В комбинации с соответствующим клапаном, гидравлический цилиндр может быть преобразован в привод позиционирования, способный создавать высокие ускорения кабины авиасимулятора. Пропорциональные клапаны управляют потоком гидравлической жидкости. Индуктивные датчики в герметичном устойчивом к давлению корпусе до 400 бар используются для контроля положения цилиндров. Индуктивные датчики линейных перемещений (LVDT линейный переменный дифферениальный трансформатор), дают данные об абсолютном положении цилиндра и положении всей кабины авиасимулятора по соответствующей оси с высочайшей точностью и динамикой.

Авиасимулятор с гидравлическими приводами и контролем положения
Используются датчики гидравлической — HYD серии.
Технология индуктивных датчиков основывается на линейном переменном дифференциальном трансформаторе (LVDT) и предназначена для использования в жестких промышленных условиях. Благодаря компактной конструкции, датчики HYD серий могут полностью встраиваться в цилиндр.
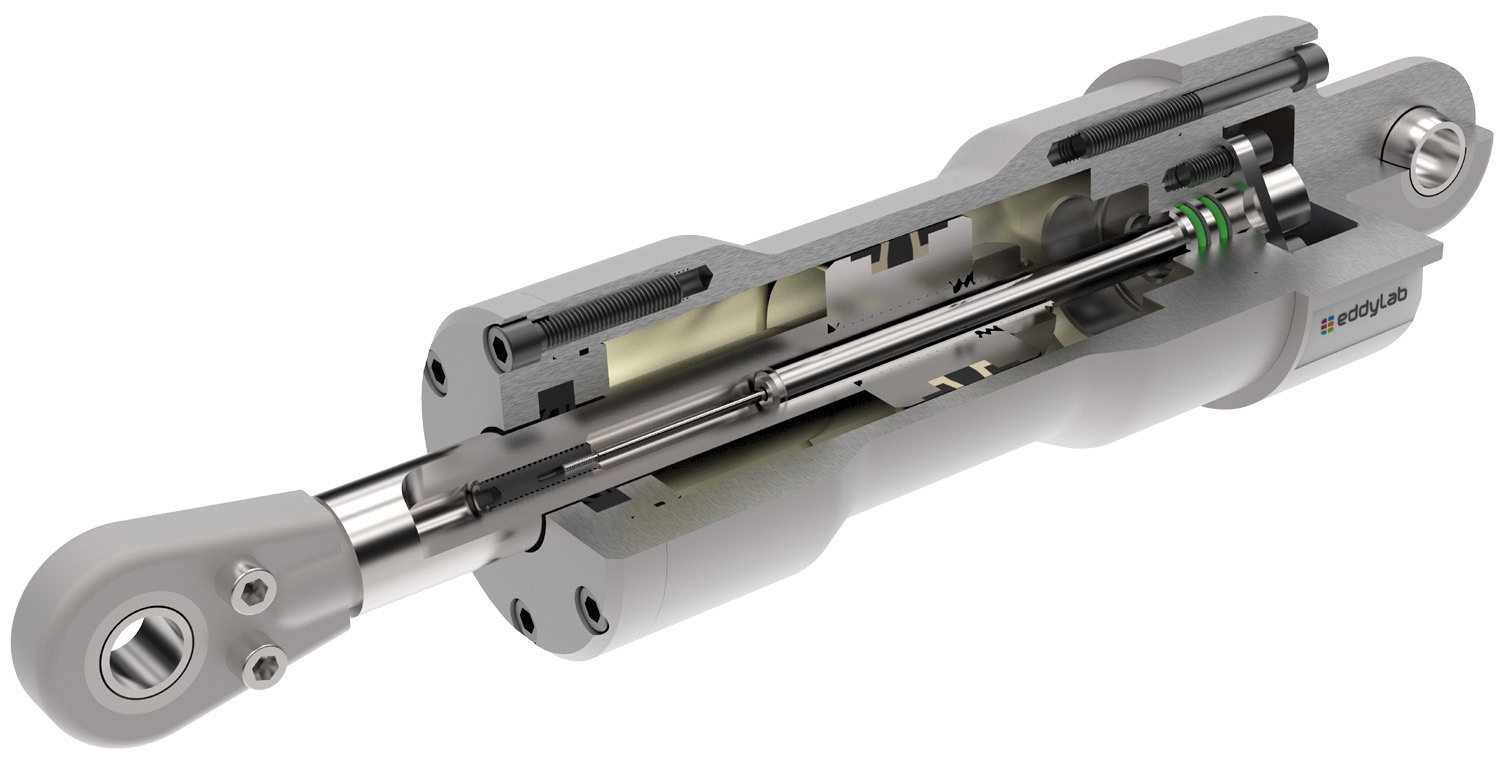
Разрез гидравлического цилиндра со встроенным индуктивным датчиком
Для этого корпус датчика привинчивается или зажимается в основании цилиндра. Поршень имеет отверстие для размещения корпуса датчика. Поршень соединяется со штоком датчика, перемещающимся внутри корпуса. По своей конструкции датчики LVDT являются одними из самых надежных и прочных датчиков. Бесконтактный принцип измерений обеспечивает отсутствие износа и гарантирует большой срок службы. Устройства могут выдерживать значительные удары и вибрации, которые могут присутствовать на динамических гидроцилиндрах, без повреждений. Только полностью залитая и инкапсулированная система катушек способна работать унутри корпуса под давлением. eddylab избегает чувствительных электронных компонентов в датчике и рекомендует их удаленную установку в шкафу автоматики или на кабеле.
Различные конструкции корпуса с резьбовым или фланцевым креплением, а также варианты с интегрированным кабелем или разъемом позволяют оптимально встроить датчик в цилиндр. Фланцевое крепление обеспечивает макисмальную простоту встраивания в головку цилиндра и монтажа. Кроме того, eddylab предлагает услуги по адаптации конструкции датчика в отношении диапазона, фланца, давления и других требований заказчика.
Абсолютные энкодеры Pepperl+Fuchs
Абсолютные энкодеры Pepperl+Fuchs представлены моделями однооборотных и многооборотных шифраторов с широким выбором интерфейсов и предназначены для эксплуатации в различных технологических условиях.
Надежность и точность абсолютных поворотных энкодеров Pepperl+Fuchs решают задачи контроля и управления положений деталей в автоматизированных системах.
Технические характеристики абсолютных энкодеров Pepperl+Fuchs
- Размеры корпуса: 36 мм, 58 мм, 116 мм;
- Модель вала: полый, выступающий;
- Диаметр вала:
выступающий вал: 6-10 мм,
полый вал: 6-15 мм; - Максимальная скорость вращения: 12000 об/мин.;
- Степень защиты: IP54, IP64, IP65, IP66, IP67;
- Максимальная нагрузка на вал: осевая: 20N. 40N, радиальная: 40N. 110N;
- Тип присоединения: разъемы и кабели;
- Рабочая температура: −40. +85°С;
- Электрические интерфейсы: SSI, PROFIBUS, PROFINET, EtherCat, CANopen;
- Максимальное разрешение: 65535 (16 бит).
Абсолютные шифраторы Pepperl+Fuchs, основанные на принципе магнитного обнаружения, используют двухосный датчик Холла. Вращающееся магнитное поле генерирует сигнал синуса или косинуса. Этот сигнал обрабатывается внутренним процессором, генерируя выходной сигнал.
С добавлением датчика Виганда однооборотные абсолютные энкодеры становятся многооборотными. Когда постоянное магнитное поле вблизи датчика Виганда вращается, оно генерирует изменение направления магнитного поля в сердечнике датчика Виганда и индукционное напряжение в катушке вокруг поворотного датчика. Напряжение меняет знак при изменении направления магнитного поля дважды на каждом обороте. Это используется для учета оборотов.
- индуктивные;
- потенциометрические;
- магнитострикционные.
Потенциометрический датчик линейного перемещения
Датчик данного типа в своей основе имеет электрический контур, содержащий потенциометр (переменный резистор). при перемещении объекта его сопротивление изменяется.
В таких датчиках используется простая технология, поэтому как правило они обладают небольшой стоимостью. При этом их точность довольно большая. Однако, они часто чувствительны к износу, вибрациям, посторонним предметам и экстремальным температурам.
Индуктивный датчик линейного перемещения
Имеет переменный резистор, содержащийся в электрическом контуре. при перемещении объекта его сопротивление изменяется.
Индуктивные датчики линейного перемещения являются более высокоточными и широко используются во многих отраслях промышленности.
Их главными преимуществами является низкая стоимость и почти неограниченный срок службы.
Магнитострикционный датчик линейного перемещения
Имеет генератор магнитного поля и считывающую головку, встроенную в датчик. Их взаимодействие позволяет определять положение объекта.
Такие приборы являются высокоточными, их разрешение доходит до 1 мкм при уровне защиты до IP67. В следствии своих высоких технических характеристик, магнитострикционные датчики являются одними из самых дорогих
Как изготовить своими руками
Проще всего создать потенциометрический датчик и подключить к нему какой-либо микропроцессор.
Для создания потенциометрического датчика нужно взять блок питания и потенциометр, регулировочную ручку которого следует подключить к перемещаемому объекту. К потенциометру нужно подключить один из выводов микроконтроллера в режиме АЦП (обязательно через ограничительный резистор, чтобы вход не сгорел), а к другому выводу следует подключить систему, управление которой осуществляется (аналогично через резистор).
Не так сложно изготовить индуктивный датчик. Для этого понадобится тот же микроконтроллер с входом в режиме АЦП, две обмотки для будущего трансформатора и регулируемый сердечник. Подвижную часть сердечника нужно подключить к движущемуся объекту, АЦП – ко вторичной обмотке, первичную обмотку соединить с источником питания, к другому выводу микроконтроллера следует подключить управляемую систему. Нельзя забывать об ограничительных резисторах.

По аналогии можно собрать емкостной датчик с введением диэлектрика. Вместо обмоток трансформатора подключаются обкладки конденсатора, вместо ферромагнетика сердечника – любой диэлектрик.
Можно собрать и лазерный датчик линейного перемещения. Как раз такой применяется в станках с ЧПУ. Проблем с приобретением самого излучателя нет. Они могут возникнуть на этапе обработки сигнала с лазерного излучателя. Делать это проще всего с помощью микроконтроллера (например, SMT или AVR), но для отладки обработки этого сигнала потребуется потратить много времени, если нет большого опыта в проектировании таких устройств.
Технические устройства с более сложной конструкцией, конечно, тоже можно самостоятельно собрать. Тем более, что их схемы доступны в интернете, вопрос только в подборе номиналов элементов. Хотя лучше приобрести готовые изделия, потому что они заранее проверены и настроены инженерами компании-изготовителя.
Примеры практического применения индуктивных датчиков
Датчики LX33xx ориентированы на такие варианты типового применения как:
- определение положения, линейного, вращательного и углового смещения;
- измерение расстояния, скорости и ускорения, угла поворота;
- переключение при обнаружении приближения (для линейного и вращательного движения);
- определение условий окружающей среды (температуры, влажности, и т. д.);
- температурные измерения;
- определение плотности, усилия, уровня и давления;
- измерение скорости потока жидкости;
- контроль микрозазоров.
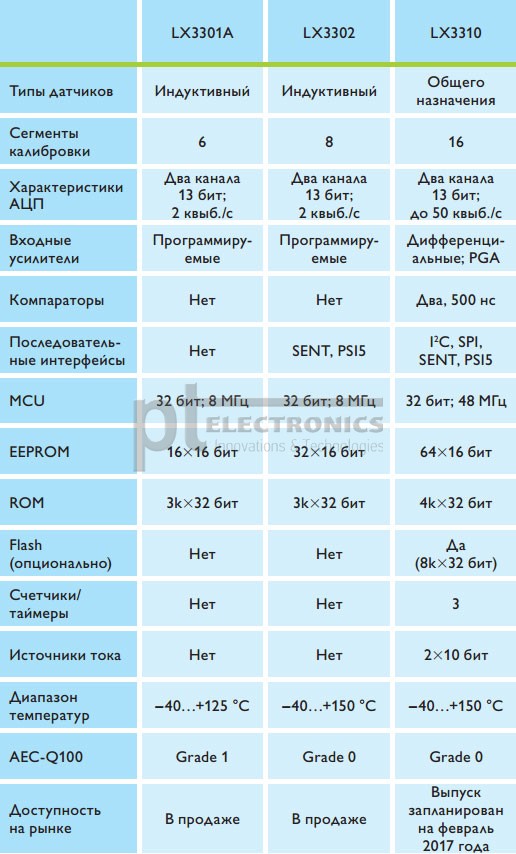
Таблица 2. Ключевые технические характеристики индуктивных датчиков семейства LX33xx
Это открывает широкие возможности успешного применения датчиков LX33xx в АСУ в самых разных областях: в автомобильных, медицинских, промышленных и аэрокосмических системах управления.
Так, измерение углового или вращательного движения необходимо для:
- контроля вращения;
- управления роботизированной рукой;
- определения положения вращающихся валов (распределительного вала, ротора и т. д.), педалей, рычагов, дроссельных заслонок, вентилей;
- определения скорости дисковых приводов.
На рис. 4 показаны типовые примеры устройств, где индуктивные датчики применяются для определения вращательного движения, а на рис. 5 — углового движения.

Рис. 4. Типовые примеры применения индуктивных датчиков для обнаружения вращательного движения

Рис. 5. Типовые примеры применения индуктивных датчиков для обнаружения углового движения

Рис. 6. Типовые примеры применения индуктивных датчиков для обнаружения линейного движения
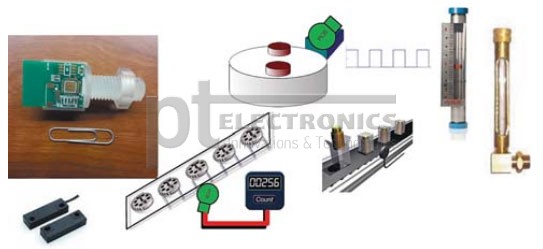
Рис. 7. Типовые примеры применения индуктивных датчиков для бесконтактного обнаружения приближения
Кроме того, измерение линейного движения и обнаружение приближения необходимо для:
- отслеживания уровня жидкостей;
- определения текущего состояния коробки передач (трансмиссии) и смены передач;
- определения положения приводов и активности подвески;
- бесконтактного обнаружения приближения.
На рис. 6 показаны типовые примеры устройств, где индуктивные датчики применяются для определения линейного движения, а на рис. 7 — приближения.
Датчики перемещения WayCon

WayCon является производителем точных измерительных систем и профессиональных датчиков для промышленности и научных исследований. Мы имеем решения для всех приложений в областях определения положения и дистанционных методов измерений, измерений уровня и угловых измерений.
Вам нужно подобрать датчик в индивидуальном порядке? . тогда мы рекомендуем Вам связаться с нами для получения специальных рекомендаций для настройки вашего приложения. В частности, мы может посоветовать, какую технологию использовать для эффективности затрат и требуемой точности.
Именно поэтому Вы не найдете каталог с готовыми на складе продуктами, но по обзору продуктов с подробной таблицей, Вы можете подобрать продукт в индивидуальном порядке. Мы конфигурируем оборудование по вашей спецификации и, при необходимости, даже в тот же день.
![]()
![]()
Вытяжные тросовые датчики
Вытяжные тросовые датчики предназначены для измерения линейных и нелинейных перемещений. Компактная конструкция допускает гибкую и лёгкую установку. Из-за небольших размеров, точное измерение возможно даже в тяжёлых условиях.
Машиностроительная промышленность, медицина, хранение и перемещение техники, погрузочные платформы, краны, автомобильная промышленность, позиционирование промышленных роботов, оборудование по производству стали, шлюзовые ворота
Легкая установка, высокодинамичные приложения, прочный корпус, полиамидное покрытие тросов из нержавеющей стали, регулируемые выходные сигналы, нелинейное перемещение, пользовательские исполнения, степень защиты вплоть до IP 68
Вихретоковые датчики
Принцип работы вихретокового датчика основан на явлении электромагнитной индукции. Переменное электромагнитное поле, созданное катушкой датчика, создает вихревые токи в металлическом объекте, которые воздействуют на поле возбуждающей катушки и изменяют её индуктивность. Это вызывает изменение параметров колебательного контура (амплитуды, частоты, фазы), в который входит катушка датчика. Регистрация изменения этих параметров позволяет определить свойства предмета и его положение относительно датчика. Выходной сигнал, пропорциональный расстоянию формируется как, например, 0 . 10 В или 4 . 20 мА.
Широко примененяются в системах управления работой различных агрегатов. В частности, вихретоковый метод — один из эффективных и надежных методов при контроле и диагностике состояния вращающихся валов различных установок. С помощью вихретоковых датчиков обеспечивают измерение относительной вибрации, числа оборотов, искривление, а также тепловые расширения вала ротора.
Также применяется для бесконтактного контроля качества, контроля толщин материала и позиционирования роликов .
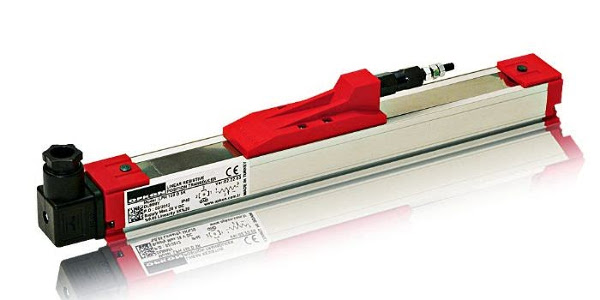
Линейные потенциометры
Линейные потенциометры хорошо известные преобразователи перемещения. Принцип работы — изменение напряжения с помощью гибридной токопроводящей плёнки. Можно получить различные корпуса и типы крепления, такие как, для гидравлических цилиндров со сферическими, зажимными монтажными губками или подпружиненной нагрузкой. Первый линейный потенциометр со степенью защиты IP 68 и бесконтактной системой измерения (LMI-серия) представляет собой новое поколение ЛП с кольцевым магнитным бесконтактным датчиком внутри корпуса. Поэтому срок службы этих датчиков составляет не менее 100 млн. циклов. В отличие от традиционных систем эта серия исключает дополнительные колебания от контактов из-за применения бесконтактных магнитных колец. Надёжная конструкция и недорогая система измерения, очень быстро изготавливается и адаптируется.
Пневматические и гидравлические цилиндры, инжекторные и формовочные машины, производство пластика и металла, автоматизация, листогибочные машины, упаковочные машины, текстильная промышленность.
Диапазоны 0-10. 2000 мм, неограниченное разрешение, нелинейность ± 0,05 % полной шкалы, сменная оснастка, степень защиты до IP 65, рабочая температура -30. + 150° C, скорость перемещения 10 м/с, срок службы не менее 100 млн. циклов.
Система измерения перемещений LiView
Насколько сложно интегрировать систему LiView в имеющийся цилиндр?
Система LiView может использоваться с любым дифференциальным цилиндром со вставленным или привинченным подшипником штока поршня, а также с плунжерными цилиндрами с диаметром штока/поршня от 30/60 мм до 130/195 мм. Перед встраиванием цилиндр необходимо модифицировать в соответствии с требованиями Liebherr Components. Изменения являются незначительными: например, правильное позиционирование зондов и оконечного ВЧ-элемента.
Перед установкой LiView мы хотим наилучшим образом подготовить не только вас, но и ваш цилиндр. Поэтому перед началом работ мы выполняем электрическое моделирование вашего цилиндра. Кроме того, мы поможем вам механически модифицировать подшипник штока поршня.
На каком расстоянии от цилиндра можно размещать электронный модуль?
Длина кабеля между модулем и цилиндром может доходить до 1,5 м. При заказе следует указать длину с шагом 10 см.
Влияют ли на результат измерения такие процессы, как старение гидравлического масла или изменение температуры и давления?
Нет. Однако эти факторы влияют на диэлектрическую проницаемость и, следовательно, на полярность и проводимость масла. Тем не менее благодаря использованию разработанного нами принципа компенсации точность измерений LiView остается стабильно высокой в течение длительного времени.
Подвержены ли зонды износу?
Нет, так как контактный элемент зонда находится в плавающем состоянии и поэтому не изнашивается. В ходе наших тестов не было зафиксировано никакого износа даже после прохождения очень большого расстояния.
Для каких типов масел подходит система LiView?
Система LiView идеально подходит для использования со всеми минеральными гидравлическими маслами, включая биомасла Liebherr (Liebherr Hydraulic Plus и Liebherr Hydraulic Plus Arctic). Особым случаем является биомасло фирмы PANOLIN — в настоящее время с помощью системы LiView мы можем измерить ход цилиндра только до 1 метра. Вы используете другое масло для своих цилиндров? Мы с удовольствием протестируем его в соответствие с вашими требованиями на совместимость с LiView.
Могу ли я легко и быстро откалибровать систему LiView?
Да! Точная калибровка выполняется после первой установки электронного модуля на цилиндр. При этом цилиндр необходимо перемещать от упора к упору, чтобы обеспечить работу Liview во всем диапазоне. Калибровку вы можете без каких-либо проблем провести самостоятельно, используя наше программное обеспечение Liebherr, которое мы с радостью предоставим вам бесплатно. Данное программное обеспечение также будет полезно в следующих случаях:
- параметризация CAN–интерфейсов,
- настройка параметров калибровки,
- считывание памяти ошибок.
ЕМКОСТНЫЕ ДАТЧИКИ
Принцип работы электронного емкостного датчика построен на изменении емкости плоского или цилиндрического конденсатора в зависимости от перемещения одной из обкладок. Также учитывается такой показатель как диэлектрическая проницаемость среды между обкладок.
Одно из преимуществ подобных устройств – очень простая конструкция, которая позволяет достичь хороших показателей прочности и надежности.
Емкостные датчики широко используются в самых разнообразных отраслях. Простые в изготовлении приборы отличаются низкой себестоимостью производства, при этом обладают длительным сроком эксплуатации и высокой чувствительностью.
В зависимости от исполнения устройства делятся на одноемкостные и духъемкостные. Второй вариант более сложен в изготовлении, но отличается повышенной точностью измерений.
Область применения.
Наиболее часто емкостные датчики используют для измерения линейных и угловых перемещений, причем конструкция устройства может различаться в зависимости от метода измерения (меняется площадь электродов, либо зазор между ними). Для измерения угловых перемещений используют датчики с переменной площадью обкладок конденсатора.
Также емкостные преобразователи используют для измерения давления. Конструкция предусматривает наличие одного электрода с диафрагмой, которая под действием давления изгибается, меняя емкость конденсатора, что фиксируется измерительной схемой.
Таким образом, емкостные измерители могут использоваться в любых системах управления и регулирования. В энергетике, машиностроении, строительстве обычно используют датчики линейных и угловых перемещений. Емкостные преобразователи уровня наиболее эффективны при работе с сыпучими материалами и жидкостями, и часто используются в химической и пищевой промышленности.
Электронные емкостные датчики применяются для точного измерения влажности воздуха, толщины диэлектриков, различных деформаций, линейных и угловых ускорений, гарантируя точность показателей в самых разных условиях.
2.1. Индуктивные датчики линейного перемещения с переменной величиной воздушного зазора
Принцип работы индуктивных датчиков основан на изменении индуктивности катушки с магнитопроводом под воздействием различных факторов. Они широко применяются при преобразовании линейных и угловых перемещений, при контроле изменения давления, расходов жидкостей и газов и т. д. Индуктивность L катушки с магнитопроводом при наличии воздушного зазора δ равна:

где w – число витков катушки; Rм.ст = lм/(μSм), R = 2δ/(μS) – магнитные сопротивления стального магнитопровода и воздушного зазора, Гн -1 ; lм – средняя длина стального магнитопровода, м; – длина воздушного зазора, м; μ, μ – магнитные проницаемости стального магнитопровода и воздуха, Гн/м; Sм, S – площади поперечного сечения стального магнитопровода и воздушного зазора, м 2 .
Согласно данному выражению индуктивные датчики можно построить на использовании изменения величин, входящих в это выражение. Наибольшее применение находят индуктивные датчики с переменными величинами воздушного зазора, площадью зазора или магнитной проницаемостью (магнитоупругие датчики).
На рис. 5.1, а изображен простейший индуктивный датчик линейного перемещения с переменной величиной воздушного зазора , являющейся входной. Изменение воздушного зазора δ при перемещении якоря 1 относительно неподвижного магнитопровода 2 приводит к изменению индуктивности L катушки датчика 3. Магнитное сопротивление Rм цепи определяется сопротивлениями стального магнитопровода (сердечника и якоря) Rм.ст и двух воздушных зазоров R, т. е. Rм = Rм.ст + R. Так как R>> Rм.ст, то индуктивность катушки
 .
.

Отсюда видно, что индуктивность катушки обратно пропорциональна величине воздушного зазора. Ток в цепи катушки (рис. 5.1, а)
 ,
,
где Rк и хк = ωL – активное и индуктивное сопротивления катушки; Rн и хн – активное и индуктивное сопротивления нагрузки.
При этом напряжение на выходе датчика

Обычно хк>>Rк. При активной нагрузке Zн = Rн, и при условии, что сопротивление нагрузки мало по сравнению с сопротивлением катушки, вышеприведенное выражение можно представить в виде:
 или Uвых=k,
или Uвых=k,
где  .
.
Таким образом, при принятых допущениях статическая характеристика Uвых=φ(δ) индуктивного датчика будет линейной (прямая 1, рис. 5.1, б). Реальная же характеристика будет иметь нелинейные участки при малых и больших зазорах (кривая 2, рис. 5.1, б). При малых δ сказывается сопротивление Rм.ст, а при больших возрастают потоки рассеяния, которые не учитываются в вышеприведенном выражении.
Индуктивные датчики с переменной величиной воздушного зазора применяют для измерений перемещений в диапазоне 0,11 мм. При больших величинах статическая характеристика датчика становится нелинейной. Поэтому при перемещениях до 58 мм используют индуктивные датчики с переменной площадью (рис 5.1, в), а при еще больших перемещениях (до 50 мм) – индуктивные датчики плунжерного типа (рис. 5.1, г). Для питания индуктивных преобразователей применяется переменный ток как промышленной (50 Гц), так и повышенной частоты (400, 500, 1000 Гц), что позволяет уменьшить габариты датчиков.
К недостаткам простейших индуктивных датчиков относятся наличие тока Iх.х и, следовательно, напряжения Uост на выходе при = 0 (рис. 5.1, б), а также низкая чувствительность при малых перемещениях. Кроме того, эти датчики являются однотактными и поэтому не реагируют на изменение знака входной величины.
Отмеченные недостатки отсутствуют у двухтактных (реверсивных) индуктивных датчиков, обычно включаемых по дифференциальной или мостовой схемам.

